2025
Beverley Gorry, Dr. Tobias Fischer, Prof. Michael Milford, Dr. Alejandro Fontan
Available on arXiv.
Abstract:
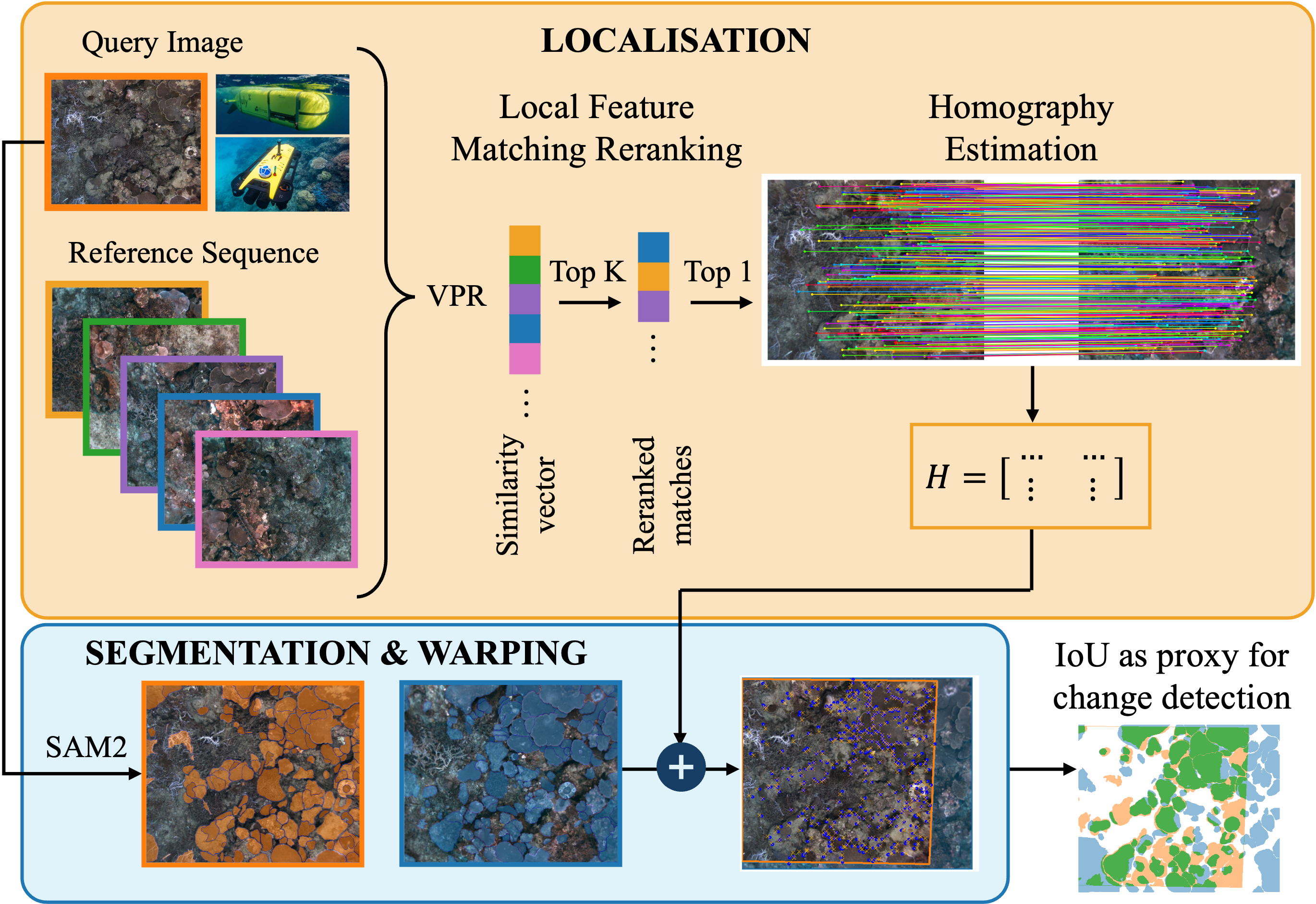
Effective monitoring of underwater ecosystems is crucial for tracking environmental changes, guiding conservation efforts, and ensuring long-term ecosystem health. However, automating underwater ecosystem management with robotic platforms remains challenging due to the complexities of underwater imagery, which pose significant difficulties for traditional visual localization methods. We propose an integrated pipeline that combines Visual Place Recognition (VPR), feature matching, and image segmentation on video-derived images. This method enables robust identification of revisited areas, estimation of rigid transformations, and downstream analysis of ecosystem changes. Furthermore, we introduce the SQUIDLE+ VPR Benchmark-the first large-scale underwater VPR benchmark designed to leverage an extensive collection of unstructured data from multiple robotic platforms, spanning time intervals from days to years. The dataset encompasses diverse trajectories, arbitrary overlap and diverse seafloor types captured under varying environmental conditions, including differences in depth, lighting, and turbidity.